

基于系统辨识的自动参数整定
24赛季步兵科技
本文由飞书知识库迁移而来。
为了节约电控用于整定 PID 参数的时间,以及方便以后使用依赖于模型的控制器,需要对机器人进行建模。本文以步兵 yaw 轴云台为例给出一个 demo,分步骤讲解如何在机器人上使用系统辨识以及自动参数整定
本系统辨识方案受官方系统辨识教程启发:官方开源教程-系统辨识基础教程
方案简述
希望辨识出以电机电流为输出,电机角速度为输出的开环传递函数模型,以便在 simulink 中使用。需要采集电机带负载在正常工况下的频率响应和阶跃响应,且为了消除随机误差,建议在不同时间,将机器人以不同方位放置在车架上进行测试。
经过尝试,如果辨识角度的传递函数,电机由于惯性,在不施加任何控制算法时,难以保证电机同一零点附近摆动,采集数据后需要进行复杂的数据处理工作,且效果不佳;故测试以角速度为输出的传递函数,由于仿真环境中是理想模型,对其积分即可得到角度。
数据采集
把车放在架子上,架子用桌子夹住,测试时按住底盘,尽量减小底盘的晃动,分别采集频率响应和阶跃响应数据

考虑到云台的转动惯量和实际工况,频率响应采集的频率范围为 1~10Hz,中间每 0.5Hz 一档,电流幅值为 6000
阶跃响应的电流范围为 0~15000(正负交替)
系统辨识所涉及的代码如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
#define RESPONSE_MODE FREQ_RESPONSE
float openloop_spd_ref = 0.0f;
float openloop_spd_fdb = 0.0f;
int openloop_spd_amplitude = 6000.0f;
// 阶跃信号发生器
static void Process_Step(float coef)
{
int tick = 0;
while (tick < 1000)
{
openloop_spd_ref = coef * 1000;
tick++;
osDelay(1);
}
}
// 频率信号发生器
static void Process_Freq(float freq)
{
int tick = 0;
float t_ms = round(1000. / freq);
freq = 1000. / t_ms;
while (tick < (20 * t_ms))
{
openloop_spd_ref = openloop_spd_amplitude * sin( freq * 2 * 3.1415926f * tick * 0.001f);
tick++;
osDelay(1);
}
}
void Test_Response(void)
{
GimbalYaw_ControlTypeDef *gimbalyaw = GimbalYaw_GetControlPtr();
#if RESPONSE_MODE == FREQ_RESPONSE
for (float freq = 1.0f; freq <= 10.0f; freq += 0.5f)
{
Process_Freq(freq);
}
#endif
#if RESPONSE_MODE == STEP_RESPONSE
for (int stepcoef = 1; stepcoef <= 15; stepcoef++)
{
Process_Step(stepcoef);
stepcoef *= -1;
Process_Step(stepcoef);
}
#endif
}
在除云台控制之外的另一个任务中调用 Test_Response()函数,openloop_spd_ref(发给电机的电流)和 openloop_spd_fdb(IMU 角速度反馈)为需要采集的数据,
在不同时间段,机器人在架子上不同方位,频率响应和阶跃响应各测四次数据
数据清洗
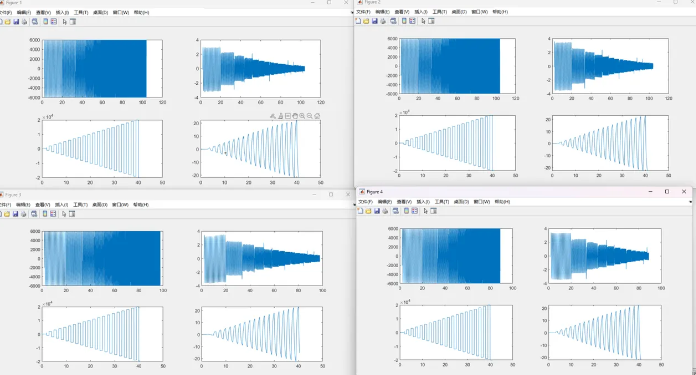
去除掉频率响应数据中,程序刚运行电机还未启动时的数据
导入 matlab,数据如下:
模型辨识
以频率响应作训练集,阶跃响应作验证集进行线性系统辨识,暂未加入非线性环节,选择传递函数作为系统结构,辨识出的结果如下
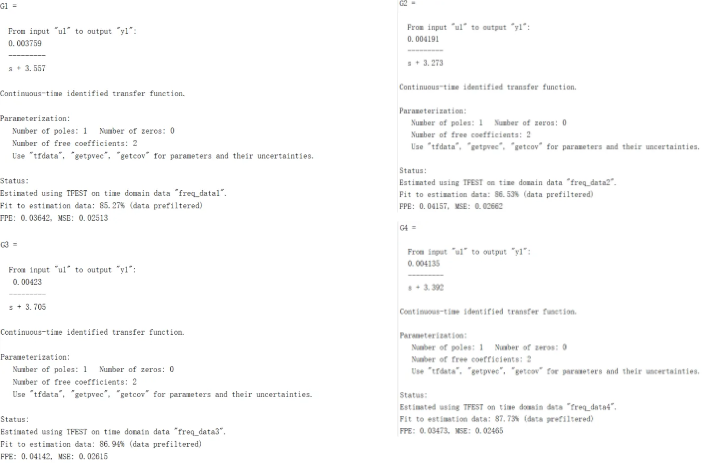
选择符合物理规律的电机传递函数$\frac{K}{Ts + 1}$的形式,效果是最好的,置信度在百分之 80 多,如果增加零极点个数,置信度一般在百分之 90 多,但是在验证集上表现会比较差,即出现明显的过拟合
对于系统辨识工具箱中的其它选项,包括拟合算法,频率范围筛选,去除平均值作归一化等预处理和辨识方式,可以根据需要查阅和使用。
模型验证
阶跃响应作为验证集,效果如下
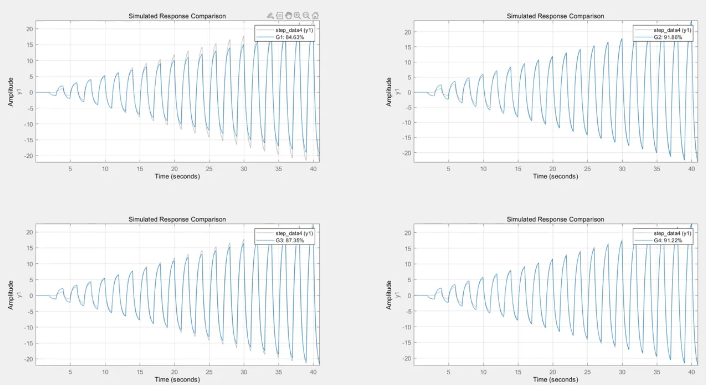
可以发现,就验证效果而言,相对较好的 G2 和 G4 在幅值变大时效果很好;但所有模型在阶跃响应幅值不大时表现相对交叉,目前怀疑是机器人存在局部非线性环节(如云台松动、静摩擦力等),在此理想模型的构建中暂时不予考虑。
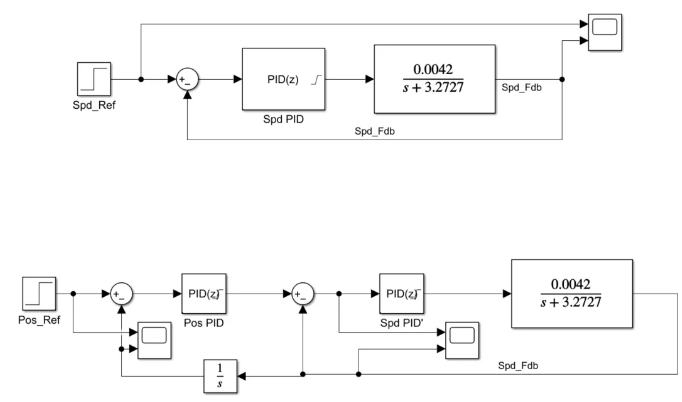
模型仿真与控制器设计
取效果最好的 G2 系统作为云台电机在实际工况下的传递函数,在 simulink 中搭建最简单的速度-角度串级 PID,同时加上输出限幅和积分限幅。使用 PID_Tuner 根据想要的控制效果自动整定,先整定速度环,再整定角度环。
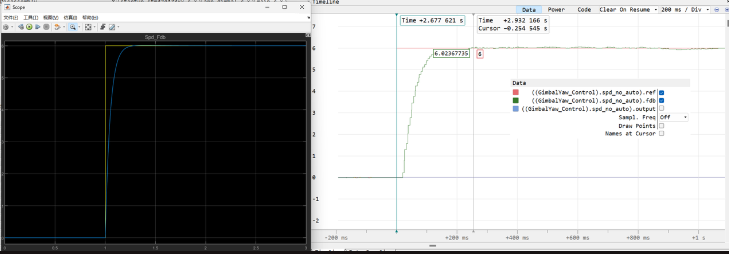
从仿真到实车
将仿真中得到的参数放进代码中运行,得到结果如图,实际结果较好地符合了仿真结果
几点注意:
- 注意 Matlab 对离散 PID 和滤波器的实现,和代码中是否一致。如步兵老框架中的\(I\)就和离散 PID 算法中的\(I\)不一致,步兵调参中所谓的\(I\)其实是\(I \times \text{d}t\)(采样时间)。
- 注意检查单位,角度、弧度还是编码器的刻度,建议统一为弧度的标准单位。如步兵老框架中,对 IMU 数据而言,角速度是弧度每秒,角度是度每秒。
- 就目前(2024.6.21)的效果而言,不敢说实际响应绝对精确地符合仿真,会有那么一点差别。simulink 的 PID 模块内部其实很复杂,以积分抗饱和为例,有 back-calulation 和 clamping 两种实现,笔者尚不清楚它们的实现原理是否跟自己代码中的一致,也有可能导致实际和仿真的误差。但基于辨识整定出的参数一定是能用的,如果发现两者响应大相径庭,建议检查其它问题,如前两条中说的算法实现和单位,以及建模过程的数据采集,模型辨识等。
- 针对第三点中提到的”实际响应不敢说绝对符合仿真“这一点,一方面是仔细分析,尝试加入非线性环节进行辨识,让模型更逼近实际工况,另一方面,就打比赛而言,笔者更建议是用相对准确的模型自动整定参数,放到机器人上跑,根据实际效果再花个几分钟手动微调达到想要的效果(比如第三点中提到的积分限幅)。