

ROS2简介
梳理 ROS2 的工作空间、功能包、节点、话题、服务、动作、通信接口和参数等基础概念

ROS = 通信机制 + 开发工具+ 应用功能 + 生态系统,目的是设计一套标准的机器人平台和其中的软件,提高机器人软件复用率,不要重复造轮子,高效开发机器人。ROS1 针对的是有工作站级别运算平台、以有线连接为主保证网络连接、成本高昂的实验室机器人。与之相反的需求(在资源有限的嵌入式平台运行、在有干扰的地方保证通信可靠性、做成产品走向市场)便是 ROS1 面临的问题,类似问题的涌现致使 ROS2 诞生。ROS2 面向的需求有:多机器人系统、跨平台、实时性、网络连接安全可靠、产品化、设计开发调试测试部署等全流程的项目管理,整个框架尽量保留了 ROS1 中的概念以便于迁移。

工作空间
ROS 系统中一个典型的工作空间结构如图所示,dev_ws 为工作空间的根目录,其中包含四个子空间
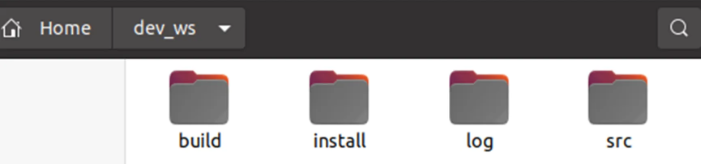
- src:代码空间,未来编写的代码、脚本,都需要人为的放置到这里;
- build:编译空间,保存编译过程中产生的中间文件;
- install:安装空间,放置编译得到的可执行文件和脚本;
- log:日志空间,编译和运行过程中,保存各种警告、错误、信息等日志。
绝大部分操作都是在 src 中进行的,编译成功后,就会执行 install 里边的结果,build 和 log 两个文件夹用的很少。
拉取工作空间后,要进行依赖配置
1
rosdepc install -i --from-path src --rosdistro humble -y
功能包
不同功能的代码划分到不同的功能包中
在 src 目录下创建功能包
1
2
ros2 pkg create --build-type ament_cmake c++_package_name # 创建C++包
ros2 pkg create --build-type ament_python python_package_name # 创建python包
C++功能包中,package.xml 包含功能包的版权描述、依赖声明;CMakeLists.txt 包含编译规则。Python 功能包中,package.xml 包含功能包的版权描述、依赖声明;setup.py 中包含 entry_points 配置的程序入口
节点
节点是机器人的工作细胞,负责执行具体任务,是可独立运行的可执行文件,得到这个可执行文件的编程语言多种多样,ROS2 中一般使用 C++和 Python。节点可以是分布式的,即运行在不同计算机上,每个节点命名唯一。实现一个节点的流程:编程接口初始化、创建节点并初始化、实现节点功能、销毁节点并关闭接口。
通信机制
通信模型有话题、服务、动作三种通信机制
话题:节点不是孤立的,通过话题来联系,话题是节点间传递数据的桥梁。话题的实现使用基于 DDS 的发布/订阅模型。发送数据的对象称之为发布者,接收数据的对象称之为订阅者,每一个话题都需要有一个名字,传输的数据也需要有固定的数据类型。话题使用.msg 文件定义。
- 发布者和订阅者的数量并不是唯一的,可以称之为是多对多的通信模型。
- 话题通信是异步的,适合用于一些周期发布的数据,比如传感器的数据,运动控制的指令等等
- 话题通信数据的描述格式称之为消息,对应编程语言中数据结构的概念。消息是 ROS 中的一种接口定义方式,与编程语言无关,我们也可以通过.msg 后缀的文件自行定义。
- 话题通信是单向的
- 实现一个发布者的流程:编程接口初始化、创建节点并初始化、创建发布者对象、创建并填充话题消息、发布话题消息、销毁节点并关闭接口
- 实现一个订阅者的流程:编程接口初始化、创建节点并初始化、创建订阅者对象、回调函数处理话题数据、销毁节点并关闭接口。
服务:从服务的实现机制上来看,这种你问我答的形式叫做客户端/服务器模型,简称为 CS 模型,客户端在需要某些数据的时候,针对某个具体的服务,发送请求信息,服务器端收到请求之后,就会进行处理并反馈应答信息。适合一问一答,同步性要求更高的数据。服务使用的是.srv 文件定义。
- 在服务通信中,客户端可以通过接收到的应答信息,判断服务器端的状态,我们也称之为同步通信。
- 服务器端唯一,但客户端可以不唯一。
- 数据分为请求的数据和反馈的数据。
- 实现一个客户端的流程:编程接口初始化、创建节点并初始化、创建客户端对象、创建并发送请求数据、等待服务器端应答数据、销毁节点并关闭接口
动作:动作也使用客户端/服务端模型,用户发送动作目标,服务端执行动作,同时周期反馈执行中的状态。动作是一种应用层的通信机制,基于话题和服务实现。动作的三个通信模块,有两个是服务,一个是话题,当客户端发送运动目标时,使用的是服务的请求调用,服务器端也会反馈一个应答,表示收到命令。动作的反馈过程,其实就是一个话题的周期发布,服务器端是发布者,客户端是订阅者。
- 动作通信可以有多个客户端,只有一个服务端
- 因为反馈,动作机制也是一种同步通信机制
通信接口
接口(Interfaces)给数据定义一个标准的结构,ROS 的接口和编程语言无关,这些定义在编译时会自动对应到具体编程语言中的数据结构
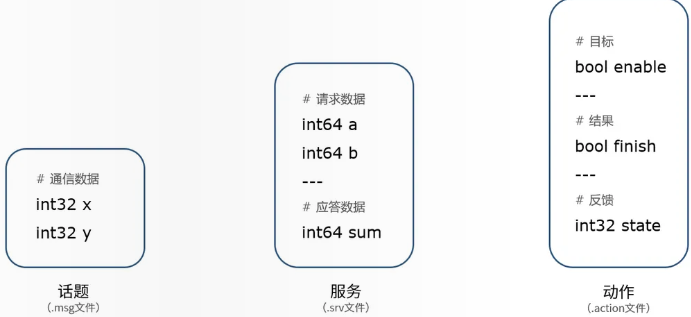
- 话题通信接口的定义使用的是.msg 文件,由于是单向传输,只需要描述传输的每一帧数据是什么就行,比如在这个定义里,会传输两个 32 位的整型数,x、y,我们可以用来传输二维坐标的数值。
- 服务通信接口的定义使用的是.srv 文件,包含请求和应答两部分定义,通过中间的“—”区分,比如加法求和功能,请求数据是两个 64 位整型数 a 和 b,应答是求和的结果 sum。
- 动作是另外一种通信机制,用来描述机器人的一个运动过程,使用.action 文件定义,比如让小海龟转 90 度,一边转一边周期反馈当前的状态,此时接口的定义分成了三个部分,分别是动作的目标,比如是开始运动,运动的结果,最终旋转的 90 度是否完成,还有一个周期反馈,比如每隔 1s 反馈一下当前转到第 10 度、20 度还是 30 度了,让我们知道运动的进度。
自定义通讯接口需要在 CMakeLists.txt(或 setup.py 和 setup.cfg)和 package.xml 中添加对应规则,使用 rosidl(interface definition language),根据自定义接口生成对应的代码
参数
参数是 ROS2 系统中的全局字典,即所有节点可访问的键值对,可编写程序声明、创建、修改参数的值,也可用 yaml 文件配合 dump 命令保存节点中的参数和 load 命令加载参数。